History
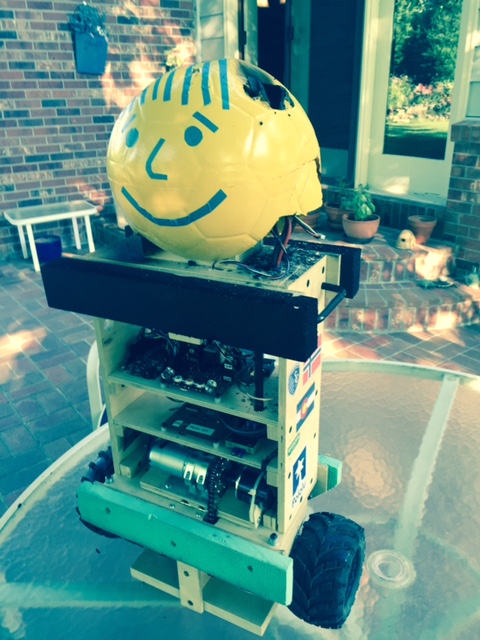
TwoPotatoe is the first robot and has evolved considerably over the past few years. It has been through many processors: Uno, Mega, Due, & Teensy 3.6. It has had some auxiliary processors: Raspberry Pi and Up Board. It has had too many wheels and motors to mention. At various times it has had sonar sensors, lidar sensors, rotating lidar sensors and now has an Intel Real Sense depth camera.
Here it is in its current configuration: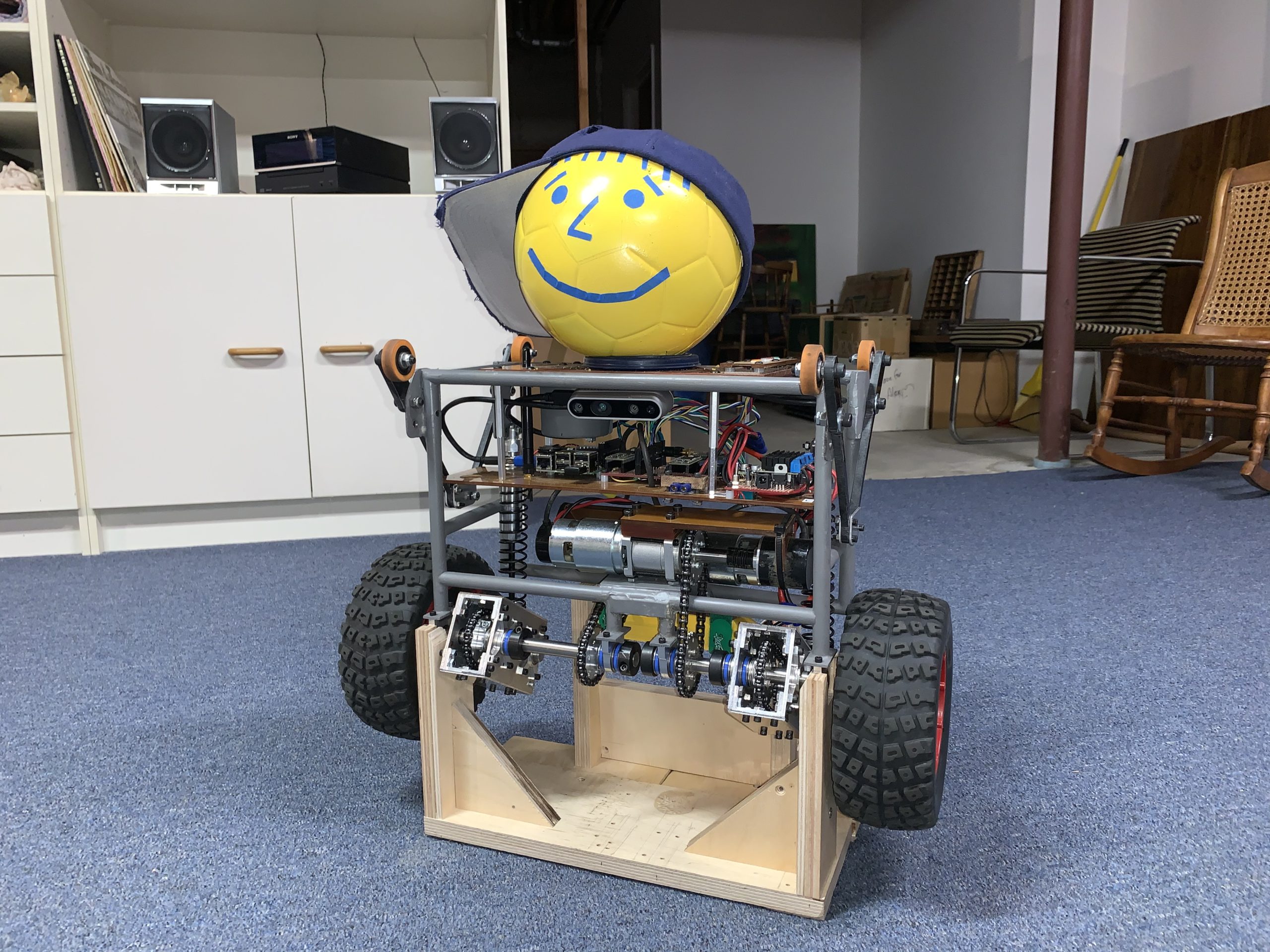
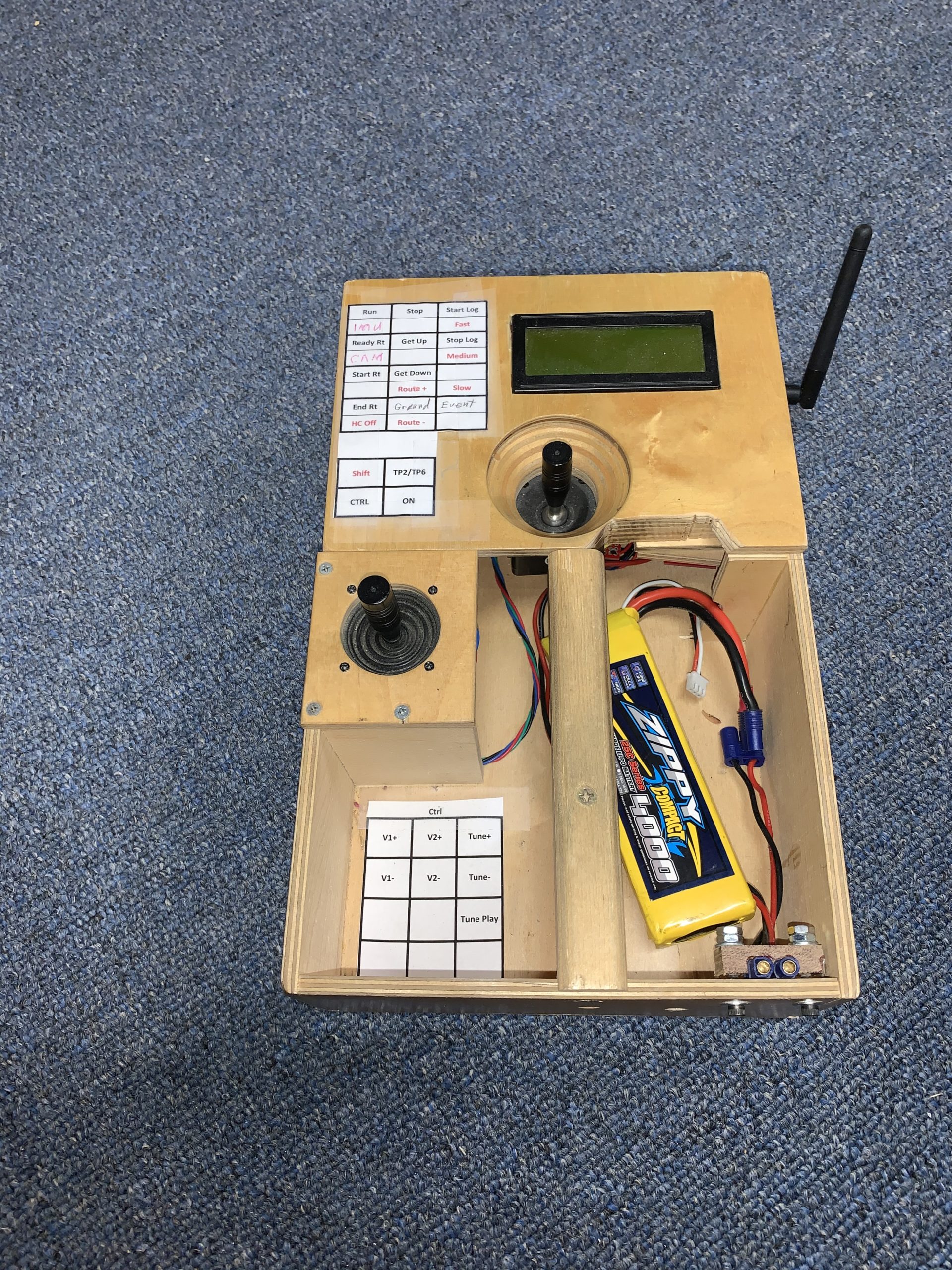
With its controller:
TwoPotatoe currently has the following features:
- A Teensy 3.6 for real-time control, including balancing and radio control.
- A Teensy 3.2 for watchdog processing as well as interfacing with LEDs, switches and the speaker.
- An UP Board that runs Ubuntu Linux. This does processing of images using OpenCV and some custom algorithms. It also does navigation during autonomous operation.
- An Intel RealSense camera. This both a standard RGB camera and a depth camera. The images are used for object recognition. Some custom routines measure the angles of nearby walls and ground. In fact, TwoPotatoe can balance just using information from the camera.
- An LSM-6 IMU from Sparkfun.
- Regulators from Pololu to provide power for the processors.
- High-power GS motor drivers from Pololu.
- A six cell lipo battery 25.2V.
- XBee 900MHz radios for communication with the hand controller.
- SparkFun Bluetooth Modem for communication with the PC.
- RS775 motors with Banebot gearboxes and 1/5 scale wheels.
- A suspension using 1/5 scale shock absorbers with 2″ of travel.
A Little Historical Archive:
Lipo battery fire